慢跑机器人
见 Robotics_Jogging.project 安装目录下的示例项目 CODESYS 在下面 ..\CODESYS SoftMotion\Examples.
此示例演示如何使用 SMC_GroupJog2 宝。
建议安装 CODESYS Depictor 对于这个例子(免费的演示版就足够了)。或者,您也可以从示例中删除相应的代码部分,以便在没有 Depictor 的情况下使用示例。
应用
为了演示最一般的情况,该示例具有以下功能:
使用具有奇点的机器人(6 轴关节机器人)。该示例显示您可以通过 ACS 中的奇点移动机器人,然后以不同的配置以笛卡尔方式继续慢跑。
机器人的机器坐标系 (MCS) 相对于世界坐标系 (WCS) 的移动和旋转。通过这种方式,您可以看到慢跑在 MCS 和 WCS 中的不同之处。
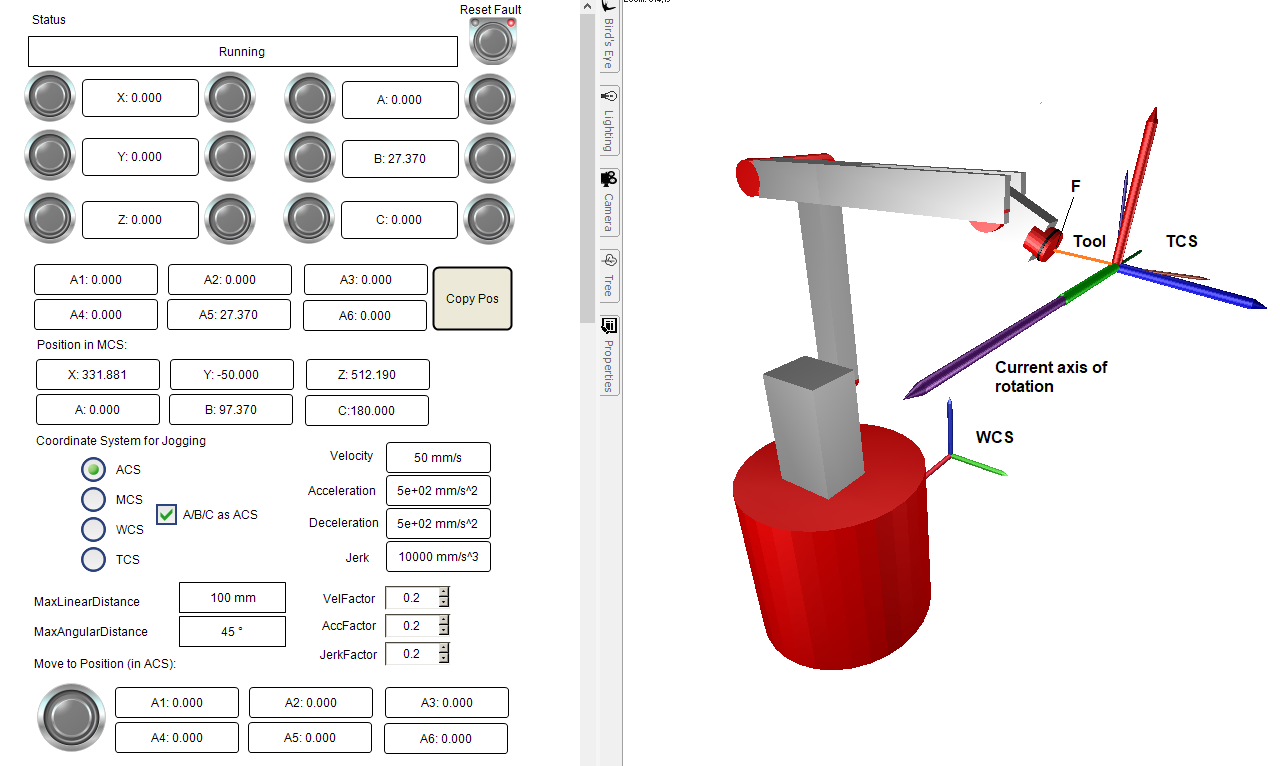
相对于法兰 (F) 移动和旋转的工具配置。在下图中,您可以看到工具以及 TCS 相对于法兰 (F) 的移动和旋转。
线性附加轴
Add0和一个旋转附加轴Add1。
应用程序的结构
主程序
主程序
PLC_PRG由一个状态机组成,它激活轴组(状态 0)
配置工具(状态 5)
配置 MCS(状态 6)
开始慢跑(状态 10)
在状态 20 中,处理慢跑错误并接受移动命令(移至位置 可视化中的开关)。
其它状态用于执行移动(60、70)以及处理和确认错误(900、1000)。
根据状态机,所有机器人 POU 和
GroupJog2程序被循环调用,并对 Depictor 中的 3D 显示进行一些计算。
GroupJog2 程序
该程序包含一个具有以下步骤的状态机:
在状态 10 中,设置 SMC_GroupJog2 的输入并读取机器人轴的配置 (SMC_GroupReadActualPosition)。此配置在轴组 (SMC_SetKinConfiguration) 的状态 20 中完成。
在状态 30 中,系统对点动期间的错误以及点动设置的变化(例如,对改变的坐标系)做出反应。如果有变化,则系统切换回状态 10。
在 Enable 输入的下降沿进入状态 50。微动由 MC_GroupHalt 停止。
调试
编译并启动创建的程序。您可以使用可视化来运行机器人。您可以定义点动的所有相关设置(例如,点动的坐标系和速度)。
如果您已经安装了 CODESYS Depictor,那么建议您将窗口与Depictor(Scene POU) 在可视化窗口旁边。
描绘器代表机器人前端的 TCS(工具坐标系)。此外,TCS 的当前旋转轴显示为紫色。这对于检查不同类型的方向变化很有用(例如,测试 ABC_as_ACS 选项和 TCS 坐标系)。